
Комфорот во возилата ги вознемирува производителите да вградуваат повеќе електромотори од потребното, во некои модели на автомобили и до 30 електромотори. Сите моторчиња мора да се активираат и деактивираат, мора да бидат сврзани со панел во видно поле на возач и патници, поради контрола, а тоа значи вмрежување со бакарни жици и до 4 километри, тежина и до 20 килограми и до 1000 жички, сите вградени со посебни конектори, што во принцип одзема ресурси, а и делува антиинженерски, но во крајна линија експлоатирачки. На места каде што одат каналници помеѓу врати и шасија, просто нема физички простор за вградување на толку многу жици. Но, за да се излезе во пресрет на комфортизацијата, на помош доаѓаат ефтини, но и скапи полупроводнички блокови коишто имаат потреба од супертенки жици, што овозможува баланс помеѓу поскапување во име на комфор и инженерски решенија коишто технички се решливи, со мултиплекс вмрежувања и серијски собирници (bus). За штедење во однос на инвестиции за комфор не може да се зборува, колку што мора да се споредува непотребното користење на ресурси коишто можат да допринесат за потреби на ресурси на многу други места. Но, да ја разгледаме контролата на моторите вградени во возилото.
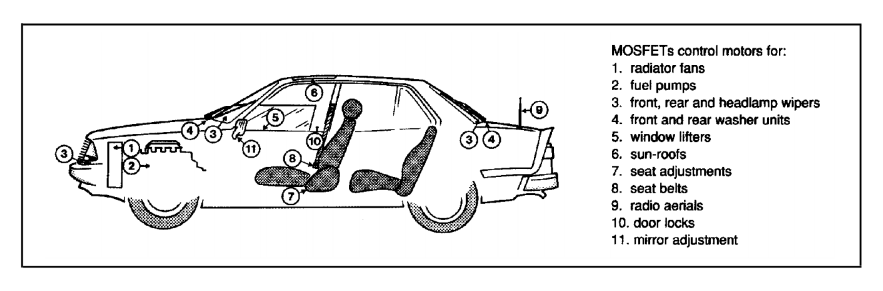
за типични микромотори во автомобил
радијатори, пумпа за гориво, бришачи за предни и задни стакла (средина офкорс), лифт за прозори, сончев линијски подвижен кров, подесување на седло, каиш за судар, антрни за радио, клуч за врати, огледала и ретровизори
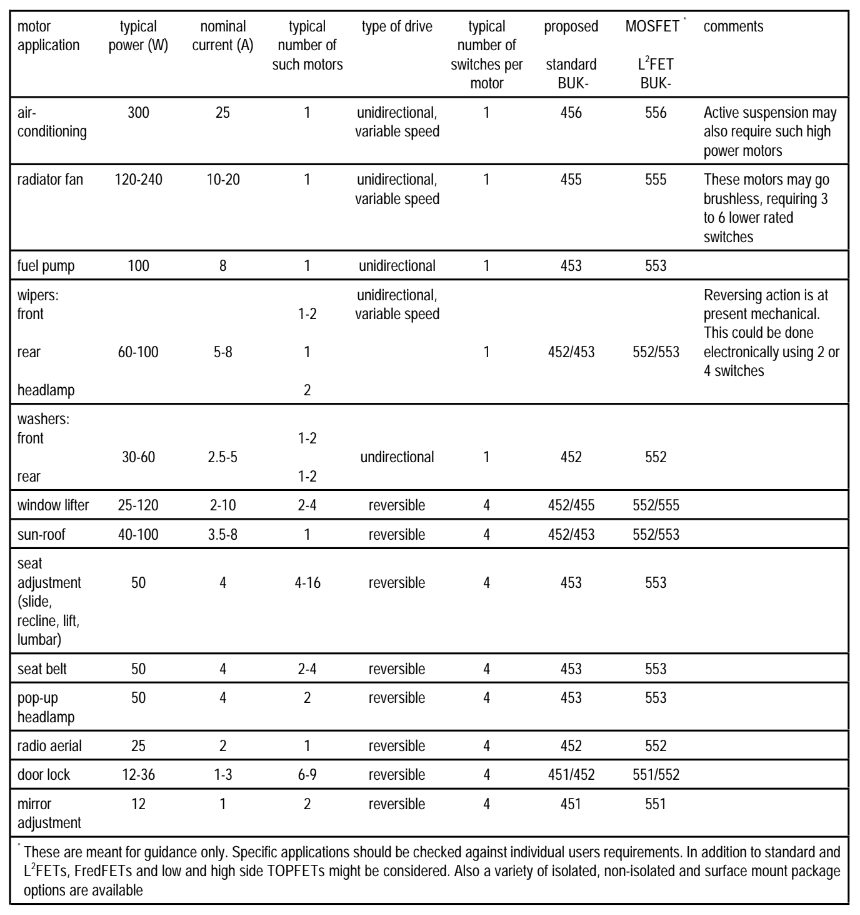
моќ, струја
број на мотори
тип на управување, и тн.
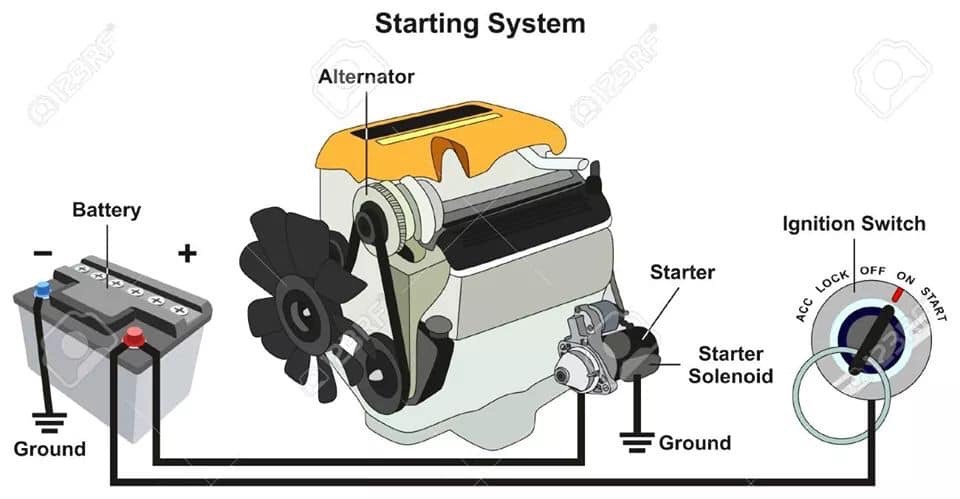
алтернатор врзан со каиш за вратило на машина
батерии
клуч и палење
заземјување на шасија на кола
Најчесто користени беа еднонасочните мотори со статорски навивки на индуктор, со арматурно напојување преку четкички и комутатор. Во последните децении, овие мотори се радикално исфрлени и на нивно место се користат мотори со перманентни магнети во широка лепеза и управување со транзистори. Често, шасијата им е квадратна.
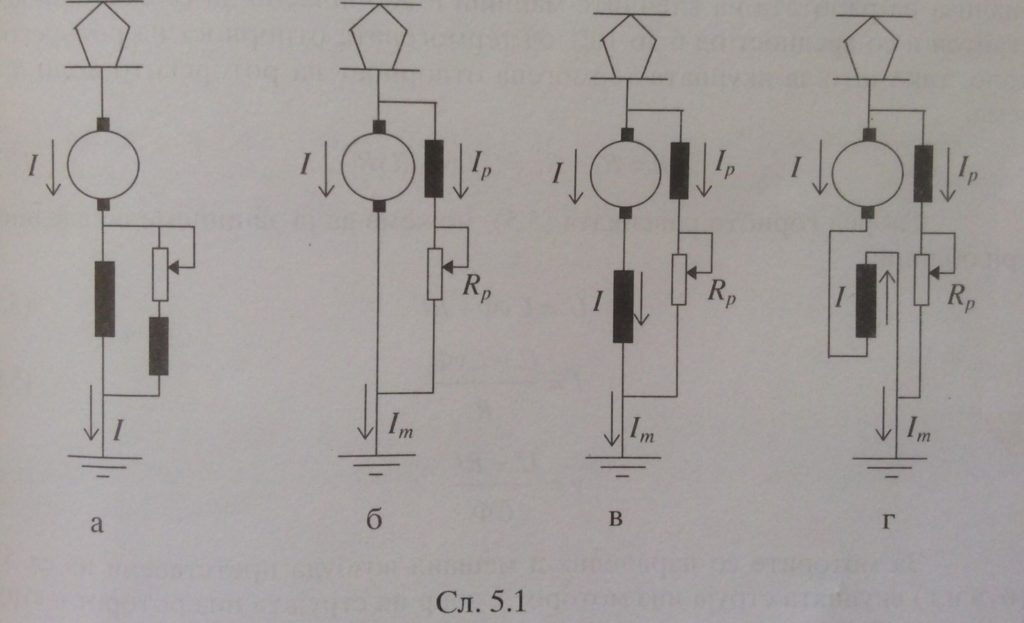
Машините за еднонасочна струја, според начинот на генерирање на нивното магнето поле, се со серијска (сл 5.1а), паралелна (сл 5.1б), мешана адитивна (сл 5.1в) и со мешана диференцијална (сл 5.1г) возбуда (слика 5.1 од книга: Електрична влеча, 1999, Карактеристики на мотори за еднонасочна струја, Чекреџи).
Еднонасочниот серијски мотор има снажен момент при старт со „бегање“ вон контрола кога не е под товар и е во празен од, еднонасочниот паралелен има релативно рамна карактеристика на момент и напон, а еднонасочен мотор со мешана возбуда e комбинација од претходните две варијанти и ретко се користи.
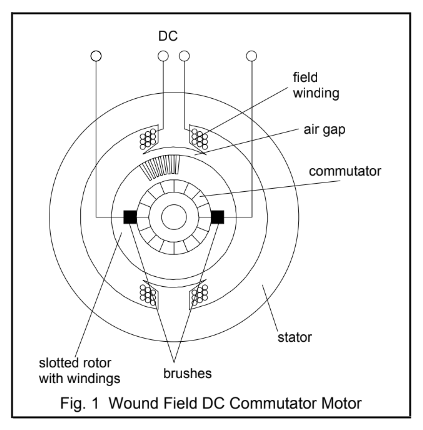
индуктор и индукт
статор и роторска арматура
еднонасочно напојување од ист извор за двете навивки
2 магнетни полиња коишто се привлекуваат и одбиваат
„слабост“ поради системот на четкички и комутација
Карактеристики на мотори за еднонасочна струја
слика 5.1
Основни равенки кај машини за еднонасочна струја
Разбирањето на процесите во моторите преку математички равенки помага во решавање на проблеми преку користење на абстрактен јазик којшто има логика со стварноста.
Независно од начинот на генерирањето на магнетниот флукс во машината, кога роторот се врти, се индуцира електромоторна сила Е која на четкичките од моторот изнесува:
E = p * ω * N * Φ / 2π * а
- p = пар на полови
- ω = аголна брзина на роторот во [rad/s]
- N = број на проводници
- Φ = резултантен магнетен флукс во [Wb]
- π = pi
- а = број на паралелни гранки на роторската намотка
При транслаторна брзина V во [m/s], преносен однос на редукторот μ и дијаметар на моторните тркала D во [m], аголната брзина на роторот е:
ω = 2 V μ / D
Константa С:
С = p * μ * N / π * а * D
Електромоторна сила Е:
E = C*V*Ф
Струјата низ роторската намотка е означена на сликата како I. За моторите со паралелна и мешана возбуда претставени на сликата 5.1 (б, в, г), вкупната струја низ моторот е збир на струјата низ роторот и струјата на возбудата:
Im = I + Ip
Отпорот е збир од отпорот низ роторската Rr гранка и отпорот на четкичките Rb:
R = Rr + Rb
Отпорот во четкичките може да се смета како константен со вредност од 6% до 10% од вкупната отпорност на колото, а падот на напон во четкичките e исто така мал во однос на приклучениот напон на роторското коло.
Кога моторот е приклучен на напон U, абсорбира моќност Po:
Po = U*Im = U*I + U*Ip = Pi + ΔPp
Абсорбираната моќност на роторската гранка е:
Pi = U*I = (E + RI)*I = E*I + R*I^2
Членот R*I^2 ја дава моќноста на трансформација на електричната енергија во топлотна во термогената отпорност на роторската гранка.
Производот на електромоторната сила и струјата низ роторот се вика електромагнетна моќност се означува со Pеm:
Pеm = E*I = C*V*Ф*I
Полезната моќност се добива кога абсорбираната моќност во роторската гранка ќе се извади од моќностите на сите загуби: механички, триење и вентилација, електрични и магнетни.
Од тука, од сите овие равенки доаѓаме до равенката за полезно дејство, каде P e моќ на периферија на излез на моќта (перфиерија на тркала без оглед дали се шински влечни возила, автобуси, тролејбуси или) и абсорбираната моќ од моторот Po.
μ = P / Po
Микромотори
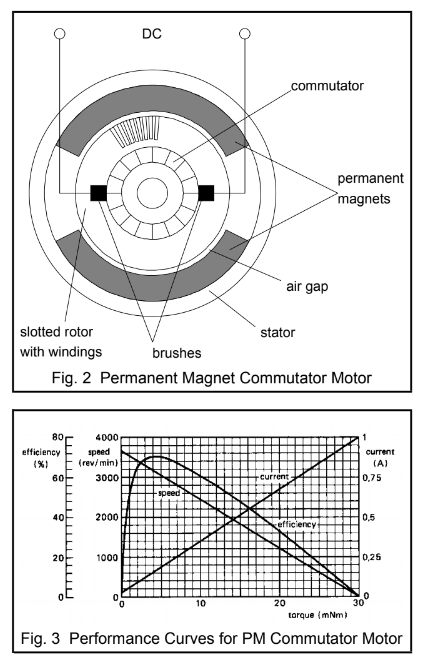
Еднонасочен комутаторски мотор со перманентни магнети. Често се користи во „модерни“ коли. Перманентни магнети го формираат статорот, а роторот се состои од железо со линијски канали во коишто се намотани бакарни жици. Имаат полесен ротор и помала големина на шасија отколку кај машините со перманентни магнети. Типичните споредбени вредности меѓу еднонасочен мотор со намотан ротор и еднонасочен комутаторски мотор со перманентни магнети ги имаат следните соодноси:
- бакар 1:10
- магнети 1:7
- ротор 1:2.5
- шасија 1:1
Моторите со перманентни магнети имаат линеарна карактеристика кога се споредуваат моментот и брзината. Се користат за брзини под 5000 [rpm/min]. Имаат индуктанса од 100 до 500 [μH] којашто е помала отколку кај намотани машини. За перманентни магнети се користат елементите: Неодимиум, железо, бор, но и доста други соединенија со што се овозможува пакирање на помоќни електромагнети во помал волумен.
перманентни магнети
еднонасочно напојување
Еднонасочни мотори со перманентни магнети без четкички. Овие мотори не се користат често во возила. Се користат за специјализирани функции на уреди како кај танкер за гориво поради тоа што е исклучена можноста за искрење. Имаат намотан статор што создава временски променливо статорско поле и перманентни магнети на роторот. Немаат комутатор и четкички, со што се елиминира бучавата и трошењето на графитни четкички. Зависат од електронска комутација и имаат потреба од мониторирање на позицијата на роторот поради што се вградуваат сензори познати како сензори со „hall effect“, поради магнетната резистенција, поради индуцираните сигнали во навивките коишто не се ексцитирани. Поради тоа што се лесни роторите со мала инерција овозможуваат голема ефикасност и густина на моќ, високи брзини и високо забрзување. Можат да се користат и како серво мотори.
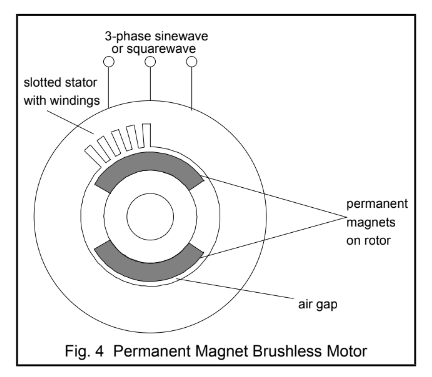
3 фазно синусно или квадратно напојување
перманентни магнети на ротор
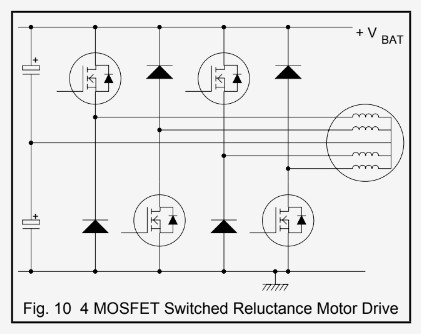
Релуктантни мотори со форсирани комутации. Во возила не се користат често. Полето од намотките до негде може да се третира како еквивалентно како кај еднонасочни мотори со перманентни магнети, со сопствени лимити и предности. Кај „поголемите“ апликации како радијатор или апарат за форсирано дување на ладен воздух, каде што е потребна подобра карактеристика меѓу моќ и тежина, примамливи се за профитирање. Можат да се користат како чекорни мотори во апликации за кочење (ABS) и контрола на педала за гас.
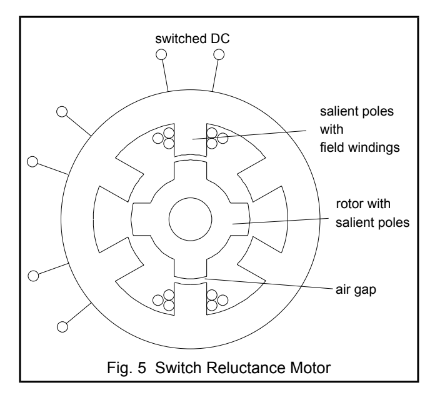
еднонасочно напојување
прекинувачки секвенци со транс-резистори
Конфигурации на управување. Изборот на типот на мотор има значајно влијание во конфигурацијата на колото за управување на моторот. Двете линии на еднонасочни мотори со комутатор и четкички, и моторите без четкички имаат различни кола за движење на моторите, според тоа потребен е соодветен избор на MOSFET транзистори, ако се гледаат типичните графици на габарит, карактеристики за форсирана комутација во однос на моќ, цена и тн.
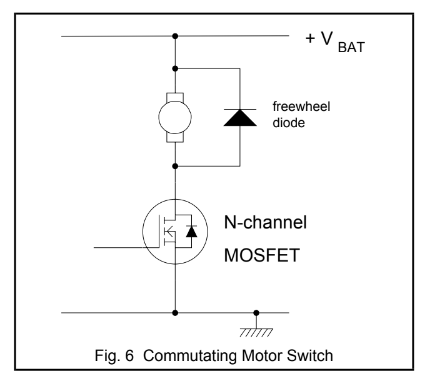
Комутаторски мотори можат да бидат контролирани од прекинувач којшто е во серија со еднoнасочно напојување. Вообичаено, порано се користеле релеи, но поранешните релеи не се сигурни на места каде што има вибрации, но денес се прават релеи со подобри карактеристики поради употреба на подобри материјали, но се* уште не можат да се споредат со транзистори на рамниште на цена. Полупроводничките блокови на тоа рамниште нудат:
• низок пад на напон во активна состојба (on),
• мала моќ за управување,
• немаат проблеми со вибрации.
Полупроводници како power MOSFET ги решаваат овие предизвици, затоа што имаат отпор којшто се мери во милиоми [mΩ] во активна состојба (on), а за активирање на портата (gate), имаат потреба од напон под 5 [V] и струја со величина блиска до нула, така што не се големи корисници на енергија.
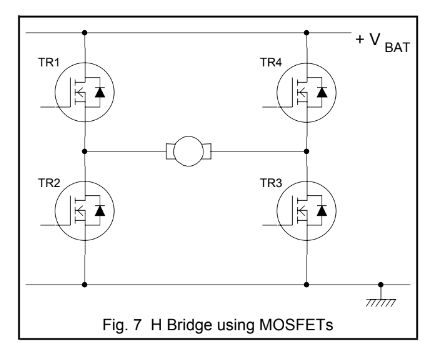
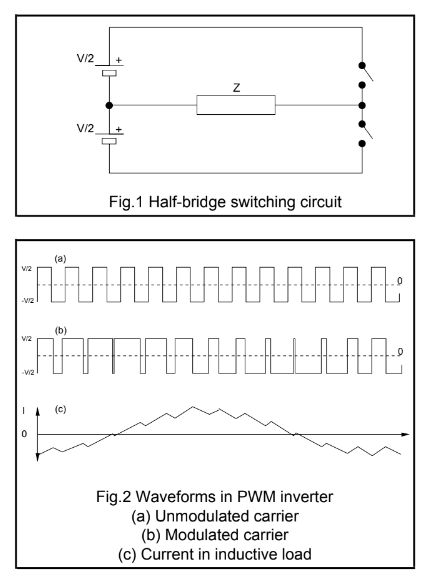
напојувањето во првата слика има знакче плус, но ако го смениме потенцијалот во негативен, тогаш комутаторските мотори ќе ја променат насоката на движење. за тоа е потребна топологија на мост со 4 полупроводници (во англо-саксонската литературата се користи терминологијата h bridge). за разлика од претходниот случај, во блок со транзисторите на мостот има вградено и диоди. но, тука имаме 4 полупроводници, наместо 1 во претходниот случај, односно 2 по насока, врзани серијски за мотор. за да се овозможи ниско ниво на пад на напон во активна позиција, секој транзистор мора да има двојно поголем физички простор. тоа значи 8 пати поголем простор од просторот којшто го завзема контрола на мотор со само 1 полупроводник. типично, кога се менува насока на ротација, логиката на системот го дава условот каде TR1, TR2, TR3 и TR4 се исклучени.
Мотори со управување на поле
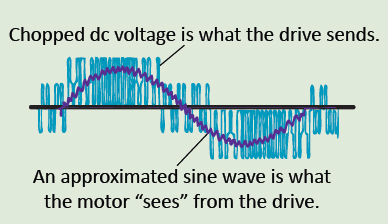
Брзината и насоката кај сите мотори кај коишто управувањето е со контрола на полето се контролираат со пулсови, временско пулсирање, пулсирања на полето или слични „термини“ коишто понекогаш звучат како терминолошки замки, а кај еднонасочните мотори без четкички, фреквенцијата и зачестеноста на временските интервали може да се добијат од интегрирани кола, а за тестирања интересен е тајмерот 555. ИМШП – импулсна модулација со ширина на пулс може уште поснажно да вози двигатели.
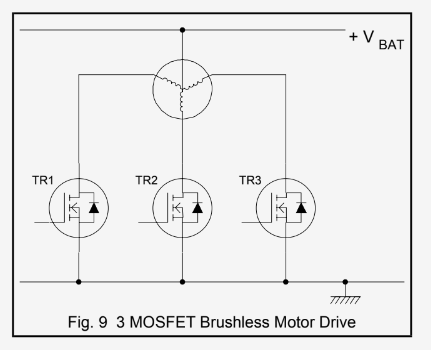
можат да се возат и со 3 прекинувачи
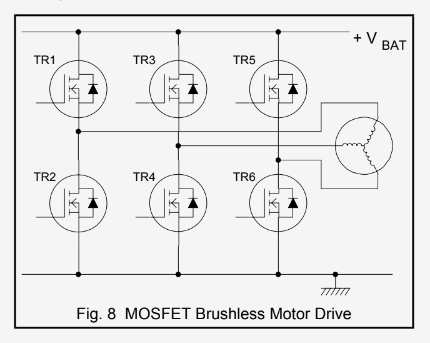
За да се добие повратна информација за контрола, потребно е во моторот да има сензори, мегнеторестриктивни, коишто на управувачката страна и определуваат која навивка е во ексцитирана состојба или е вон состојба на ексцитација. За разлика од еднонасочните комутаторски мотори, прекинувачите за мотори без четкички мора да бидат супербрзи, поради комутацијата.
во мостна конфигурација горните вериги се на позитивен потенцијал.
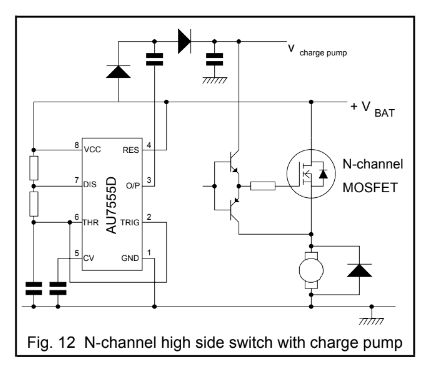
сликата прикажува дополнително напојување од напонска „пумпа“ локално монтирана во возило, со интегрирано коло коешто генерира правоаголни осцилаторни квадратни форми на 12 [V], со зачестеност од 100 [kHz]. удвојувањето на напонот го подигнува напонот двојно од батериите на 12 [V], односно до 24 [V]. оваа конфигурација е соодветна и за еднонасочни чопери.
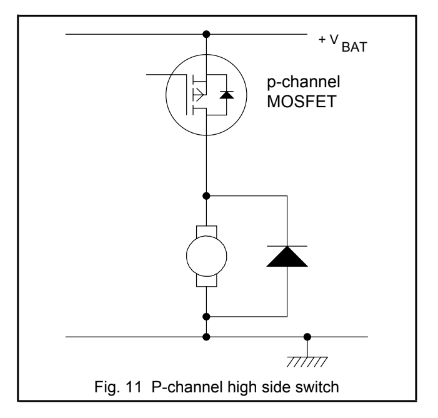
Во принцип има две можности за МОСФЕТ.
P-channel MOSFET го поедноставува колото со референца до позитивен потенцијал, но имаат потреба од три пати повеќе силиконска површина за да го достигнат рамништето на отпор како n-channel MOSFET, што ја зголемува цената, кога веќе се работи за цена. Полупроводничките уреди со п канални МОСФЕТ-и коишто се водат со логички порти се* уште не се достапни по добри цени.
N-channel, н-канални прекинувачи. Поради безбедност, за гејтот да биде комплетно активиран, до портата се носи напон и до 10 [V] повеќе отколку кај конвенционален MOSFET блок. Повисок напон може да се доведе од дополнителни напојувања, но повторно доаѓаме до лимитот поврзан со цена-та.
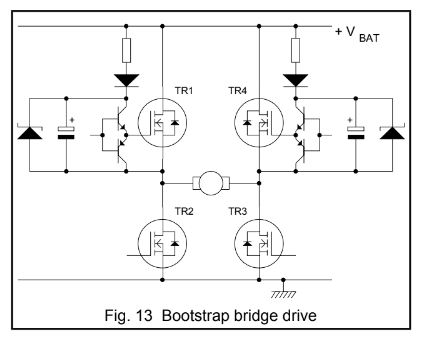
зенерови диоди за лимитирање на транзиентите во дополнителното коло
Струи
Поделба е арбитрарна според стохастичка шема.
Номиналната струја е една од состојбите на моторот во нормални околности, којашто е максимална струја во стабилна континуирана и долготрајна состојба.
Струи при преголем товар, кога моторот има поголем товар од што може да ги „носи“, кога моторот може континуирано да издражи струи коишто се поголеми, но се* уште моторот функционира. Вообичаено, ова не е состојба којашто се третира како испад или грешка и се користи на места каде што има апликации каде што повремено има поголем товар од номиналниот и којшто оперира во кратко време и затоа некаде намерно се користат вакви мотори коишто се дизајнирани да бидат преоптоварени. Во овој случај, номиналната струја е често струјата на претовар. Вредноста на струјата е до два пати поголема од номиналната со опсег од 5 до 60 секунди.
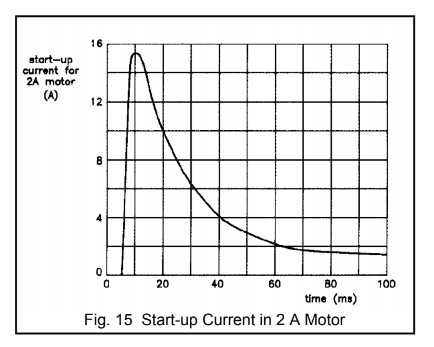
Старт со 5 до 8 пати поголеми струи од номиналната со должина на траење до 100 [ms] за снажен удар. Стартниот момент се управува со оваа струја, според тоа ако е потребен голем момент, тогаш контролното коло не смее да ја ограничува струјата. Ако од друга страна, стартниот момент е критично место на операција, тогаш може да се направат дополнителни кола и техники за контрола.
Струи при заглавен мотор, ако моторот не може да се движи поради механичка или друга причина, тогаш струјата е лимитирана само од серијскиот отпор на навивките и прекинувачите. Во ваква состојба можат да течат струи поголеми од 5 до 8 пати од номиналната вредност.
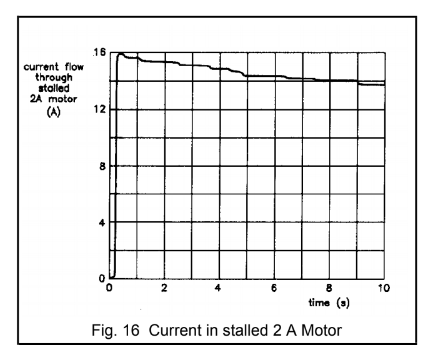
струите се намалуваат како што растат температурата и отпорот на моторот со мосфет блок
Струи на краток спој, ако моторот е краткоспоен, во тој случај струјата е лимитирана од отпорот на прекинувачот и вмрежувањето. Еден од најдобрите изуми во ваков случај е материјален топлив или вакуумски осигурувач, освен ако не се користат други типови на контрола.
Уредите коишто работат со струи од овој стохастички опсег, базиран на типовите на мотори се бираат за операции за сите вредности на струи. Кај некои блокови потребно е да се бираат полупроводнички уреди исклучиво со максимални струи. Тоа подразбира вградување на скапи непотребни уреди со оглед на SOAR (safe operating area), што подразбира струи и напони под коишто блокот нема да биде оштетен.
Напони
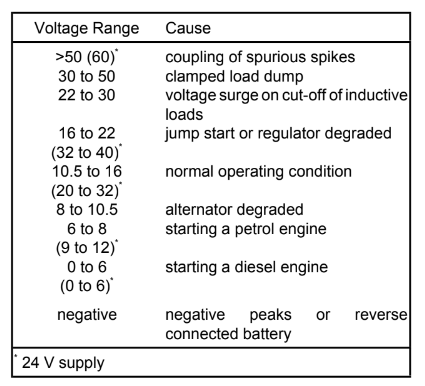
Највисоки напони под нормални услови се движат од 16 [V] до 22 [V] во разни околности, при старт, прекинувачки секвенци, исклучување, краткоспојување и тн. Ако батериите или кондензаторите се исклучени, а алтернаторот работи, напонот може да се искачи и до 50 [V] со надворешна заштита, па дури и до 60 [V] каде што има батерии од 24 [V].
но, се поставува прашањето што не може да направи систем од 12 волти, а што мора да се третира со 24 волти? тука не пишувам за камиони или автобуси.
Според тоа нормални потреби за 24 [V] системи со многу мотори се од 50 [V] до 60 [V], но со шина којашто произведува звук и зуи. Прекинување и вклучување на индуктивни товари предизвикува пренапон и стрес на заштитата во деловите од возилото коишто се во допир со напонските пикови. Пиковите можат да бидат единечни или во брановидни електромагнетни флуктуации со величини од 100 [V] или повеќе, со времетраење од 1 [ms]. Статистичка анализа укажува дека е битно да се изберат МОСФЕТ транзистори коишто имаат моќ да издржат стресови на долг рок, кадешто напонот меѓу дрејн и сорс ги надминува вредностите на транзиентите или е потребно бирање на блокови од 50 до 60 [V] коишто имаат доволна моќ во време на пикови за абсорбција на пулсови од лавина на електрони. За транзиенти со поголеми вредности битно е да се обезбеди надворешна заштита, ракавици и слично.
Температура
Полупроводничките уреди во патничката касета мора да бидат во опсегот од -40 до +85 ̊[C] а во делот со предимензионираната машински елементи за движење од -40 до +125 ̊[C]. Обично, блоковите, без оглед дали се работи за процесори, контролери, дискретни блокови и тн, оперираат со гранични температури после коишто едноставно се гасат. Ова оневозможува уништување, а ваквите лимитирачки заштити ги решаваат проблемите со термичките модели на елементите, што овозможува безбедност за долготрајна опративна работа.
Напојувањето во автомобилите доаѓа од батерија од само 12 [V]. Напонот може да варира од 10.5 [V] до 16 [V] под нормални оперативни околности. За прекинувачи од типот на МОСФЕТ, при вакви варијавии битно е да бидат во целост вклучени, а за прекинувачи коишто работат во опсег над 16 [V], мора да се донесе дополнителен напон, од напонска пумпа или бутстрап конфигурација. Конвенцинален МОСФЕТ има потреба од само 6 [V] за да се вклучи, но за да се постигне минимлен отпор во вклучена, активна состојба, потребни се 10 [V]. Од тука, маргините помеѓу потребата и можноста со напојувањето треба паметно да се пресмета и тестира. За иновативни решенија потребни се истражувања со логички порти кај МОСФЕТ, односно влез во категоријата на ЛФЕТ транзистори.
Барањата на индустријата за решенија во овој домен на индустријата за возила се огромни и тоа во делот со стабилни прекинувачки операции со транзистори и градба на мотори со едноставен дизајн.





кон дванаесетиот дел – контрола и управување на микромотори
кон единаесетиот дел – топологии на напојувања и подстаници
кон десетиот дел – формули
кон деветиот дел – ЛРТ мастер план
кон осмиот дел – инженерски антиупатства
кон седмиот дел – тракција и формирање трака
кон шестиот дел – култура X
кон петиот дел – возила и безбедност
кон четвриот дел – пантограф и троли
кон третиот дел – траси
кон вториот дел – шински систем
кон првиот дел – мотори
кон зеро – историја на макжелезници
Thyristor controlled power for electric motors, R. S. Ramshaw
Power electronics, Daniel W. Hart
Power Semiconductor Applications, Philips Semiconductors
Application Manual Power Semiconductors SEMIKRON International GmbH, Wintrich, Ulrich, Tursky, Reimann
Practical Variable Speed Drives and Power Electronics, Malcolm Barnes
Electric traction, Prof. PhD Nikola Lj. Cekredzi, Electro-technical faculty – Skopje, University of St. Cyril and Methodious, 1999
Railway electrification systems & engineering, Shailah Frey
Electrical Railway Transportation Systems, Morris Brenna, Federika Foiadelli, Dario Zaninelli
Electrical Motors and Drives, fundamentals, types and applications, Austin Hughes and Bill Drury
A textbook of electrical technology, Volume III, Transmission, distribution and utilization, 43. Electric traction, B.L Theraja, A.K. Theraja
Electromagnetic Foundations of Electrical Engineering, J. A. Brandão Faria
Traction feeding schematic https://www.irfca.org/docs/traction-feeding-schematic.html
Modern design of onboard traction transformers, Jurkovic, Sitar, Zarko, 2014, Research gate
Power System Modelling for Urban Massive Transportation Systems, Rios, Ramos, 2012, Research gate
Calculation method for powering a tramway network, Jakob Edstrand, CHALMERS, University of technology, Goteborg, Sweden 2012
Објава на мрежа 2019 Македонски железници https://www.mzi.mk/documents/OBJAVA-NA-MREZA-2019.pdf
LRT – Light Rail Transit, Institute of Urban Transport India
Elektricne masine i postrojenja, Naucna Knjiga 1988, Milos Petrovic
Elektricna vuca, Naucna Knjiga 1974, Dr. Inz. Bozidar Z. Radojkovic
Интервју, Зоран Кракутовски, Катедрата за железници при Градежниот факултет во Скопје
Предавања на Добри Чундев, Конференција за ел. возила 2013
Интервју, Петровиќ Слободан
Интервју, Марјан Матевски, МЖ
Keysan lectures http://keysan.me
МАКО СИГРЕ 2007 A1-03R, Развој на асинхрониот мотор од Тесла до денес, Чундев Мирчевски
The PN Junction. Universidad de Granada-Spain Creative Commons By-NonCommercial-NonDerivs
Ферми рамниште на валентни и спроводливи електрони https://www.youtube.com/watch?v=zdmEaXnB-5Q
Политики на ЕВРОПСКА унија EУ Директиви
IEC 62196
Light Rail Transit Association
trampower
abb
Type 2 connector
exciter
IEC Standard 60850, Railway applications – supply voltages of traction systems
IEC Standard 60038, Standard Voltages
Стандард за шински апликации BS EN 50163
Стандард за шински апликации IEC 60850
Safe operating area https://en.wikipedia.org/wiki/Safe_operating_area
Листа на електрифицирани системи
Electrification of the Transport System, European Comission 2017, Directorate-General for Research and Innovation, Studies and Report
Commons
Производители на автобуси, тролејбуси, трамваи, инвертори
bkm
etonltd
trolza
skoda
solarisbus
laz
trans-alfa
vanhool
trolleybus manufacturers
Yaskawa America
OppCharge отворен протокол
ЕЛФА Сименс
HESOP converter, ALSTOM
ЕЛЕМ ветерни паркови
Сименс СГТ750 гасна турбина
Турбини: Пелтонова, Францисова, Капланова
окно
porta3.mk
СКУП МКД
Види Вака медиа, https://www.facebook.com/watch/?v=2132703696851421
Македонски Железници, историја
Македонски Железници, јавни информации
ЈСП информации за Chariot електричен автобус Безбедност за ел. возила и автомобили GB/T 19751-2005
Физибилити студија за трамвајски систем во Град Скопје, јавни податоци
Оригинални слики за ел. возила пред 1930 https://mashable.com
еуростат
GSP
Дизајн на железница, дизајн Владимир Билд информации
Кирил Минанов, предавање за електрични возила, Автономна зона ден 14, ФЕИТ амфитеатар, 24 февруари 2015, 1800 часот
Приватни видеа Кирил Минанов
